대학원 공부노트
Hasegawa(1969) 1번 식 해설 1편 본문

[해당 페이지는 휴대폰이 아닌 컴퓨터로 보시길 적극 권장 드립니다.]
Hasegawa 논문에서 입자는 rigid가 아닌 elastic이라 상정하였으므로 음파에 노출되었을 때 변형이 일어난다.
따라서 입자의 변형(deformation)을 해석하고자 고체역학에서 배운 개념을 도입할 것이며 시작은 용어 정리이다.
전단응력 shear stress:
수직응력 normal stress:
전단변형률 shear strain:
수직변형률 normal strain:
텐서표기법 tensor notation:
>
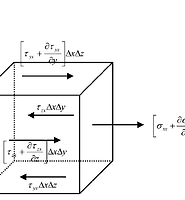
그리고 이를 바탕으로 미소체적(infinitesimal volume)에 힘이 어떻게 인가되는지 알아보도록 하자.
정육면체는 총 6개의 면을 가지며 서로 마주하는 변을 하나로 보면 총 3개의 면(surface)을 가진다.
그리고 하나의 면에는 면에 수직인 힘과 면과 평행한 방향으로 작용하는 두 종류의 힘, 이렇게 총 3 종류의 힘이 존재한다.
따라서, 정육면체에는 총 9가지 방향의 힘을 고려할 수 있다.
이를 행렬(matrix)로 나타내면 아래와 같다.
그리고 지금부터는 위 행렬이 어떻게 나왔는지에 대해 알아볼 것이다.
전단응력을 고려하기 위해 원점
그리고
그럼 원점
마찬가지로 임의의 한 점
여기에 테일러 전개(Taylor expansion)을 적용해주면 다음과 같이 풀어 쓸 수 있다.
따라서 원점과 임의의 한 점 간의 속도 차이는 아래와 같다.
그리고 '거리'는 '속력에 시간을 곱한 것'이므로 상단부만 밀린 경우 밀린 '거리'는 아래와 같다.
그리고 밀린 '정도'를 보기 위해 각도를 도입하도록 한다.
이때
여기서 단위를 보면 길이 단위를 길이로 나누어주었으므로 단위가 없는 무차원수임을 알 수 있다.
그리고 시간 당 변형률(shear strain rate)는 다음과 같다.
동일한 계산을 원점
그리고 이 둘에 대한 평균 shear strain rate를 구해주면
동일한 방법을 다른 평면에도 적용해주면 다음과 같다.
이를 앞서 언급한 tensor notation으로 표현하자면 아래와 같다.
(이때 shear strain rate in Cartesian coordinates이다.)
Furtherfmore:
Fluid mechanics 3rd edtion p.152 - p.154
컴퓨터원용 고체역학 Mechanics of SOLIDS p.547 - p.533
'대학원 공부 > Hasegawa' 카테고리의 다른 글
| Hasegawa equation (0) | 2022.08.05 |
|---|---|
| Hasegawa(1969) 1번 식 해설 4편(완) (0) | 2022.07.31 |
| Hasegawa(1969) 1번 식 해설 3편 (0) | 2022.07.29 |
| Hasegawa(1969) 1번 식 해설 2편 (0) | 2022.07.26 |
| Hasegawa(1969) 8번, 10번, 11식 해설 (0) | 2022.07.20 |